「人に近づいて撮れる」「狭い空間を通り抜けられる」これまでの空撮ドローンでは難しかった映像表現が可能なマイクロドローンが注目されている。この連載では初心者が導入にあたってつまづきそうなポイントを中心に解説していく。
文●青山祐介/構成●編集部

講師●田川哲也/ドローンにも使われている、アイペックスコネクターの設計を本職とするドローンエンジニア。まだドローンを「マルチコプター」と呼んでいた6年ほど前から、空撮用ドローンを製作し始める。2014 年からレーシングドローンの製作も手掛ける。Facebookグループ「 U199 ドローンクラブ」の発起人、管理人。2016 年 ドバイ国際大会日本代表チーム エンジニア。現在 DMM RAIDEN RACING チーム エンジニア。
マイクロドローンとプロポ、バッテリーの準備ができたら、最初にプロポと機体を接続し、プロポのスティックやスイッチの操作と、機体の動作を関連づける設定が必要です。
フタバ製プロポでは、飛行させる機体ごとに各種設定を記憶することができます。この一式の設定内容を新しい機体として追加します。さらに、「飛行機」や「ヘリコプター」といったモデルタイプの中から「マルチコプター」を選択しておきます。
次にプロポと機体を接続します。この作業を「バインド」と言い、プロポ側で機体が採用しているプロトコル(通信方式)を設定したうえで、機体は“(ある)ボタンを押しながら電源を入れる”といった操作で接続作業を行います。
プロポの操作と機体の動作を紐付ける
バインドが完了したら、機体側の設定を行います。この作業ではPCをUSBケーブルで機体に接続し、機体ごとに指定されたソフトを使い、BETA FPVシリーズの場合は「BETAFLIGHT」というソフトを使用します。これはWEB上で無料でダウンロードできます※。
具体的な設定方法はソフトによって異なりますが、原則としてプロポのスティックやスイッチの操作に対して機体の動作や機能を割り当てることと、その操作方向や位置と機体の動作や動作量を合わせます。
4方向のスティックの動きに機体のスロットル(上下)、ラダー(旋回)、エルロン(左右)、エレベーター(前後)の動作と操作量、そしてそれぞれのニュートラルの位置を設定します。そして、アングル、ホライゾン、アクロといった飛行モード切り替えと、アーム(モーターのON/OFF)の操作をプロポの任意のスイッチに割り当てるのが主な内容です。
さらに、スティックの操作に対してどれだけ機体が敏感に反応するかを決める「PID」を設定するのと、機体の姿勢を安定させるジャイロやIMUのキャリブレーション(リセット)も行います。
※BETAFLIGHTのダウンロード先(http://bit.ly/betaflight_download)2019年4月時点での最新バージョンは10.4.0。「Assets」の項目から使用OSに合ったファイルをダウンロード。
プロポに新規でモデルをつくろう!(T18SZの場合)
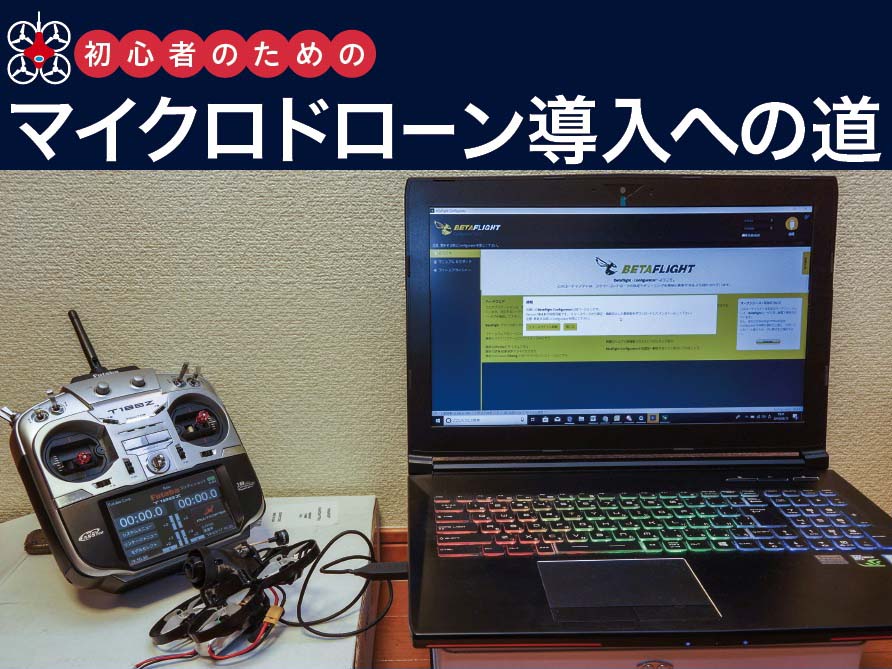
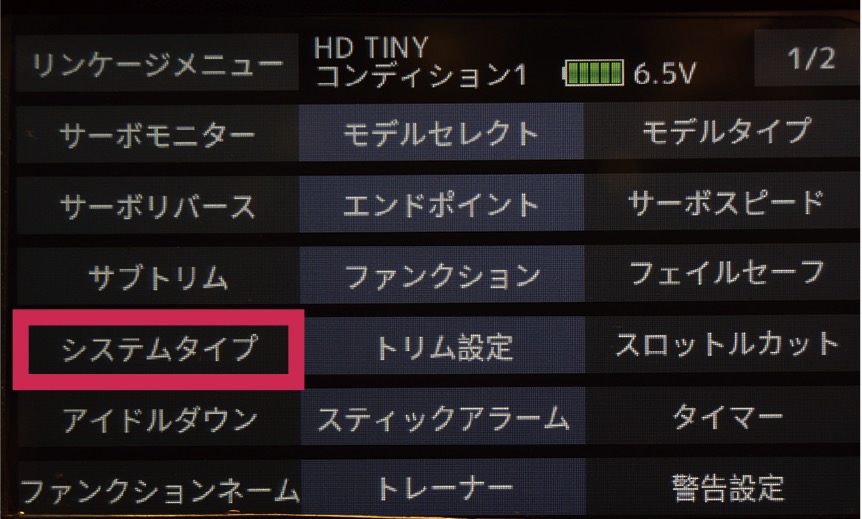
まずは「モデルセレクト」を選択し、「新規」で作成。これは複数のドローンをプロポで使う場合に、それぞれのドローンに適した設定を記録しておけるもの。次に「リンケージメニュー」の中にある「モデルタイプ」を「マルチコプター」に設定する。

プロポと受信機をバインド(連結)する(フタバT18SZとBETAFPV Beta85Xの場合)
◉講師の田川さんがバインドの流れを動画で解説。
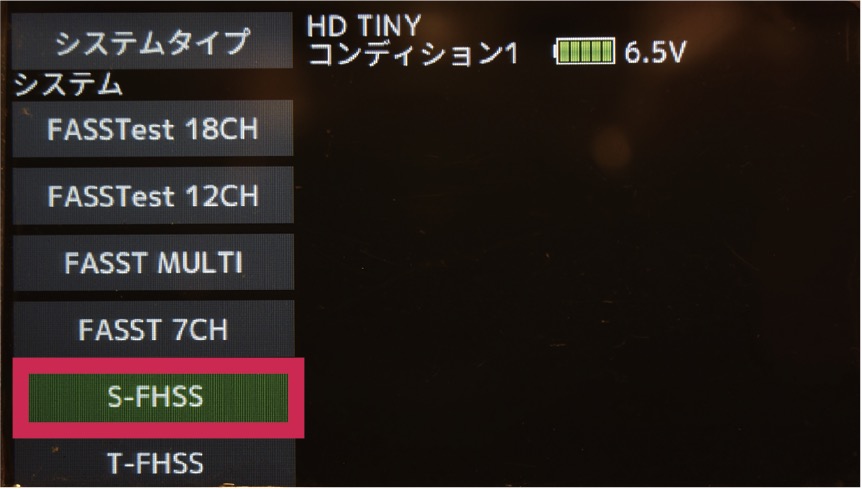
①プロトコルを確認する
プロポの電源を立ち上げ、「リンケージメニュー」>「システムタイプ」>「S-FHSS」を選択。
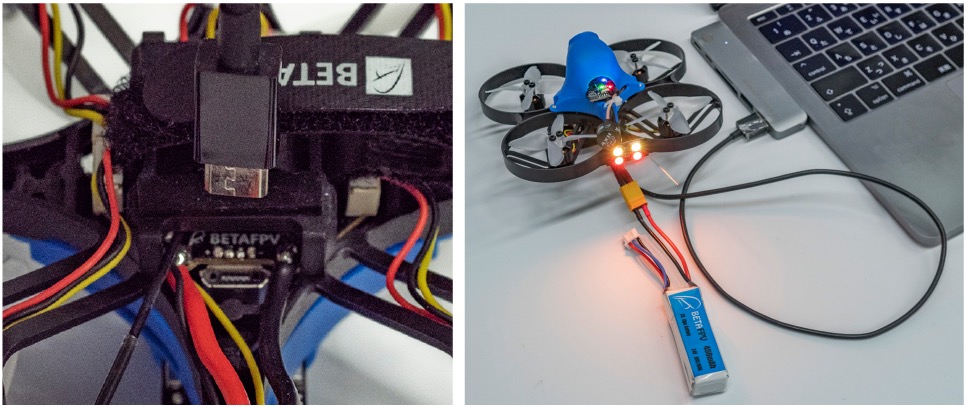
②バインドボタンを押しながら電源ON
バインド前にドローンの電源を入れると、機体の受信機のLEDは赤く点灯。これはバインドできていない状態を表す。
プロポの電源を入れ、受信機のバインドボタンを細い棒などで押したまま、バッテリーを接続して機体の電源をON。すると受信機のLEDが緑色に点滅し、やがて点灯に変わる。これでバインドは完了。次回からプロポの電源を入れるとLEDが緑に点灯する。
BETAFLIGHTでの各種設定
◉プロポとBETAFLIGHT設定 講師の田川さんが設定の流れを動画で解説。
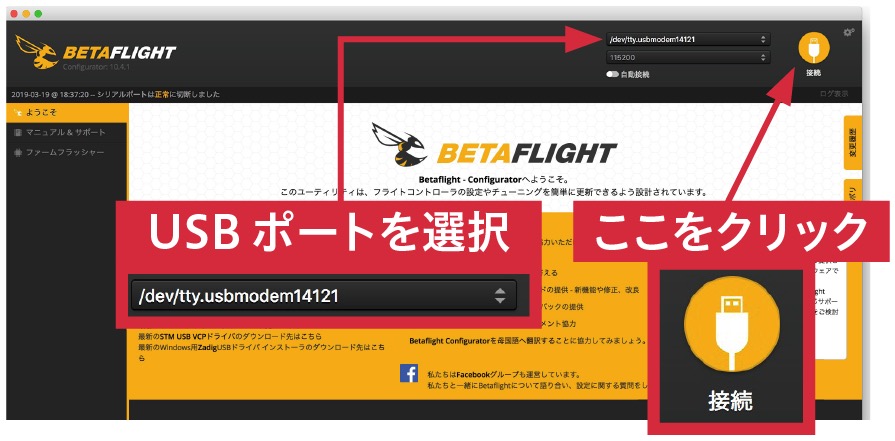
①ドローンとパソコンをつなぎソフトを立ち上げる
85Xの底面にあるUSB端子とパソコンをケーブルでつなぐ。バッテリーも装着しておく。BETAFLIGHTを立ち上げ、「接続」をクリック。次に受信機を動かすために「基本設定」>「受信機」の受信機モードが「シリアル接続受信機」、シリアル受信プロトコル「SBUS」になっていることを確認。大型機の場合は怪我のおそれもあるのでプロペラを外して接続したい。

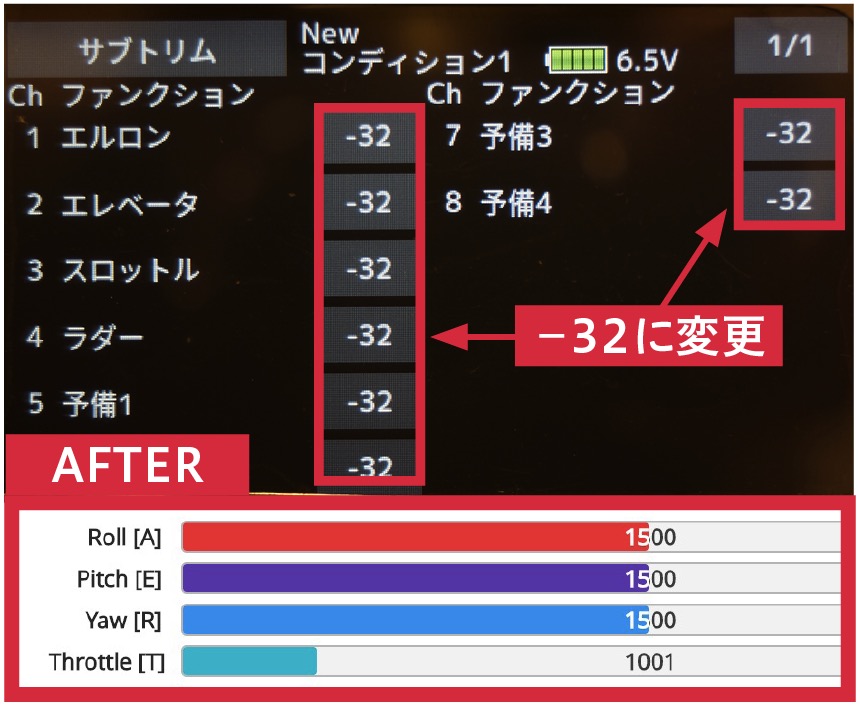
②サブトリムでスティックのセンターニュートラルを設定する
プロポのスイッチをONにして、「受信機」タブを開く。「プレビュー」のドローンを見ると、プロポのスティックを操作していないにもかかわらず、くるくると動いている。これはニュートラルが取れていない状態を表している。

Roll(エルロン)、Pitch(エレベーター)、Yaw(ラダー)の数値が1500になるようにプロポの「リンケージメニュー」にある「サブトリム」を調整(ここではすべて-32に設定した)すると、「プレビュー」のドローンが動かなくなる。これでニュートラルが取れた。
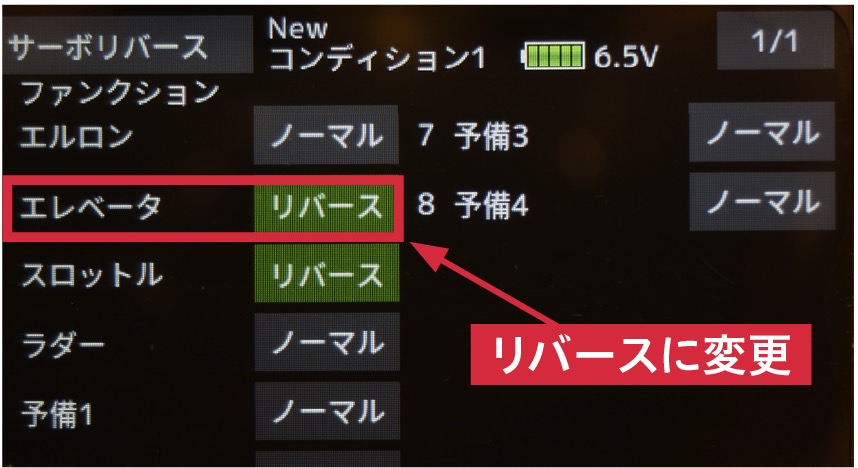
③スティックと機体の動きを一致させる
BETAFLIGHTの画面を見ながらスティックを操作してスティックを倒した方向にドローンが動くか確認する。今回はPitch(エレベーター)の動きが逆だったため、プロポの「リンケージメニュー」>「サーボリバース」でエレベーターをリバースにした。
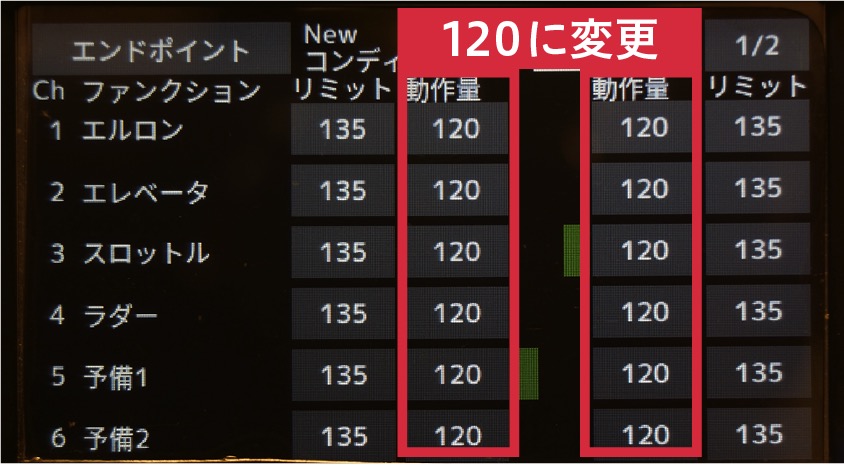
④スティックの最大値・最小値を決める
エンドポイントとはスティックの最大値と最小値の設定。最大値が2000以上、最小値が1000以下になるようにプロポの「リンケージメニュー」>「エンドポイント」の「動作量」を調整する。T18SZの場合はすべての項目を120に設定すると、エンドポイントが適切な数値になる。
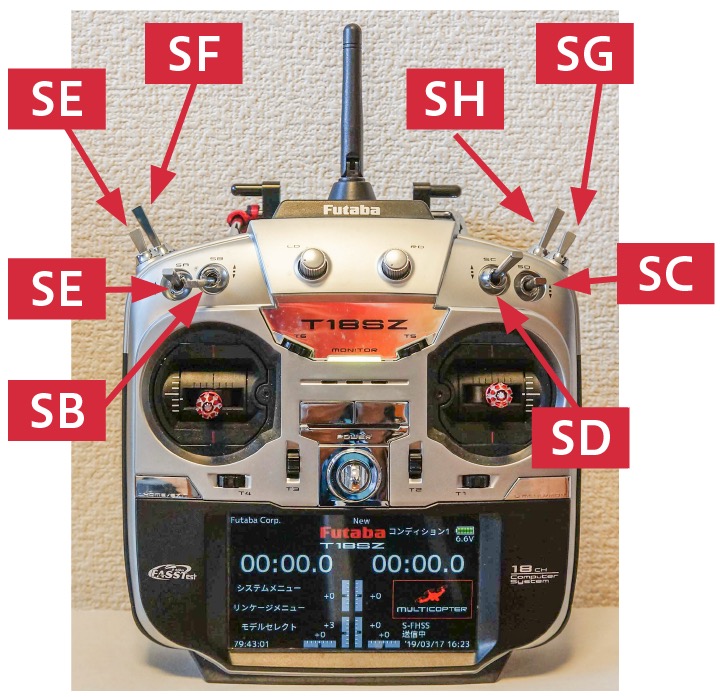
⑤プロポのスイッチに機能を割り当てる
プロポには複数のトグルスイッチが備えられていて、それぞれにユーザーの好みの機能を割り当てられる(ここでは田川さんのセッティングを紹介)。T18SZではそれぞれ上のように各スイッチに名前がつけられている。T18SZは好みの機能を8chに割り当てられる。1〜4chはスティックの操作に割り当てられているので、5〜8chのAUX CHに好みの機能を割り当てる。「リンケージメニュー」>「ファンクション」で5〜8Chの4つを「予備」に設定。5ChをSE、6ChをSG、7ChをSC、8ChをSFに設定した。
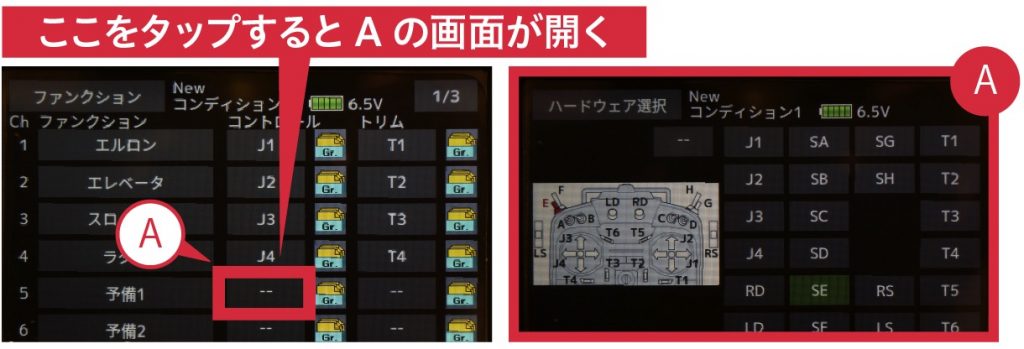
次にBETAFLIGHTの「モード」画面を開く。ここにはドローンに割り当てられる機能が上から順に並んでいる。各機能ごとにプロポのスイッチを割り当てることでその機能がはじめて使えるようになる。

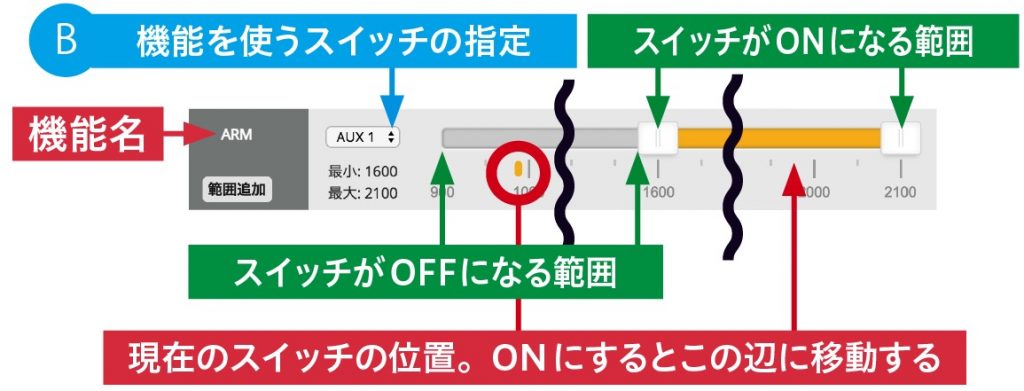
▲「モード」メニューにある1つの機能を拡大したもの。ARMはモーターを回転させる機能。AUX1はプロポの「ファンクション」の5Ch。
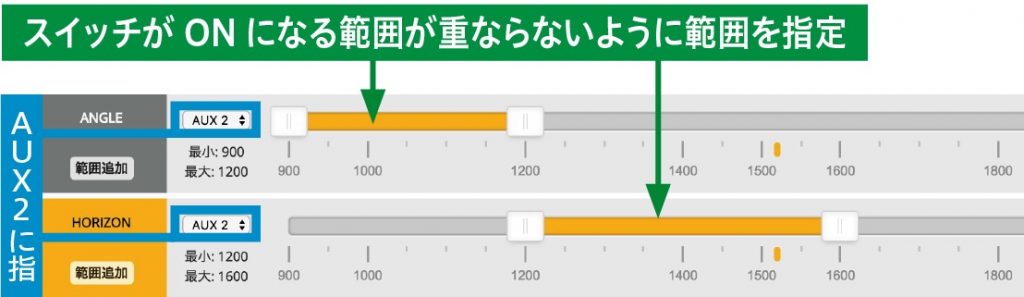
フライトモードの切り替えを一つのスイッチでできるように3ポジションのトグルスイッチに割り当てた。ソフトで3つの機能をすべてAUX2(プロポの6ch)に指定。BETAFLIGHTでアングル、ホライズンを指定すると残りはアクロの設定になる。
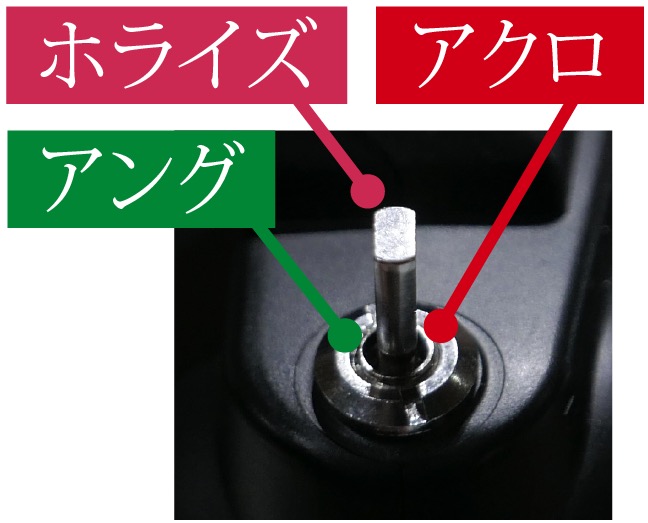
▲3ポジションのスイッチには3つの機能を割り当てた
⑥ドローンを水平な場所に起き、キャリブレーションを撮る
ドローンを水平な場所に置いて、「セットアップ」メニューの「水平キャリブレーション」をクリック。ドローンにきちんと水平を認識させることで安定したホバリングが可能になる。

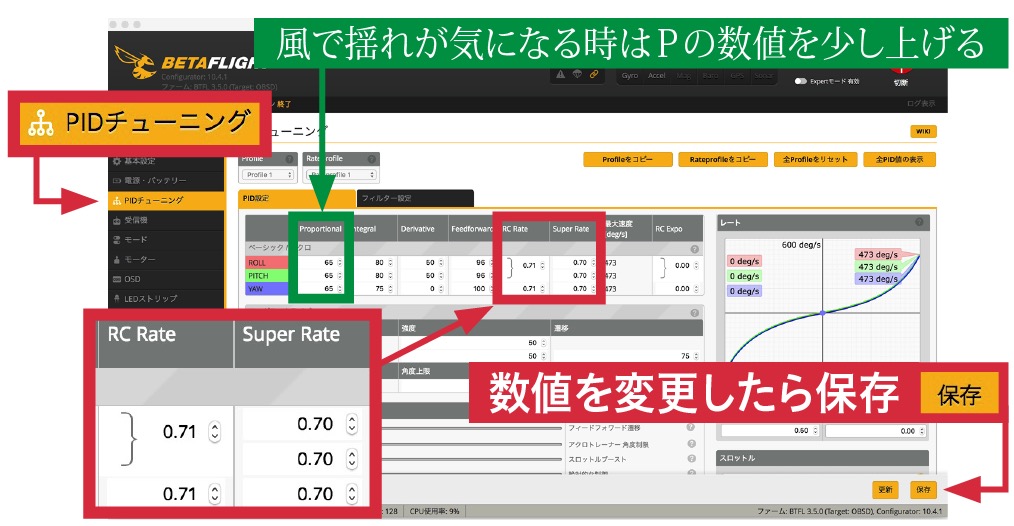
⑦PID設定で操縦の感度を調整
PIDとはPropotional(比例)、Integral(積分)、Derivative(微分)の略で、ドローンの姿勢を制御する仕組み。田川さんは「PIDチューニング」メニューで「RC Rate」を0.71、Super Rateを0.70に設定している。 初期設定はいずれも1.00。初期設定よりもプロポのスティック操作に対してドローンの動きが鈍い状態。外で風があり、機体の揺れが気になるようであればPの数値を上げると改善することもある。
●ビデオSALON2019年5月号より転載