
DJIから登場した小型FPVドローン・Avata 2。前編では基本性能や室内飛行についてレビューしたが、後編となる今回は野外でのマニュアルモードでの飛行についての解説をはじめ、ブレ補正の精度やその他気になる機能について解説していく。
レポート●イナダユウキ(コマンドディー)
目次
- 手軽にFPVドローン撮影ができるDJI Avata 2
- 屋外で目視外飛行する場合は国土交通省に申請が必要
- マニュアルモードとは?
- シミュレーターでの練習のススメ
- Avata 2をMモードに設定する方法
- 緊急停止ボタンとタートルモード
- 飛行モードとブレ補正を変えて撮影したサンプル
- DJI Avata 2に搭載されたカメラのブレ補正とGyroflowでの補正の比較
- DJI Avata 2は空撮機の代替になるのか?
- まとめ
手軽にFPVドローン撮影ができるDJI Avata 2
正直、今まで理想のFPVドローンを求めて、自作してきた労力はなんだったんだろうという気分です。もちろん自作機には自作機のメリットがあるのですが、Avata 2は長時間飛ばせて、FPVの映像もキレイ。飛行までの設定も簡単で気軽に楽しく撮影できるという点では最高な仕上がりです。仕事とは直接関係はないですが、ゴーグルを装着して、自分が飛んでいる気分を味わえるという体験はやみつきになります。
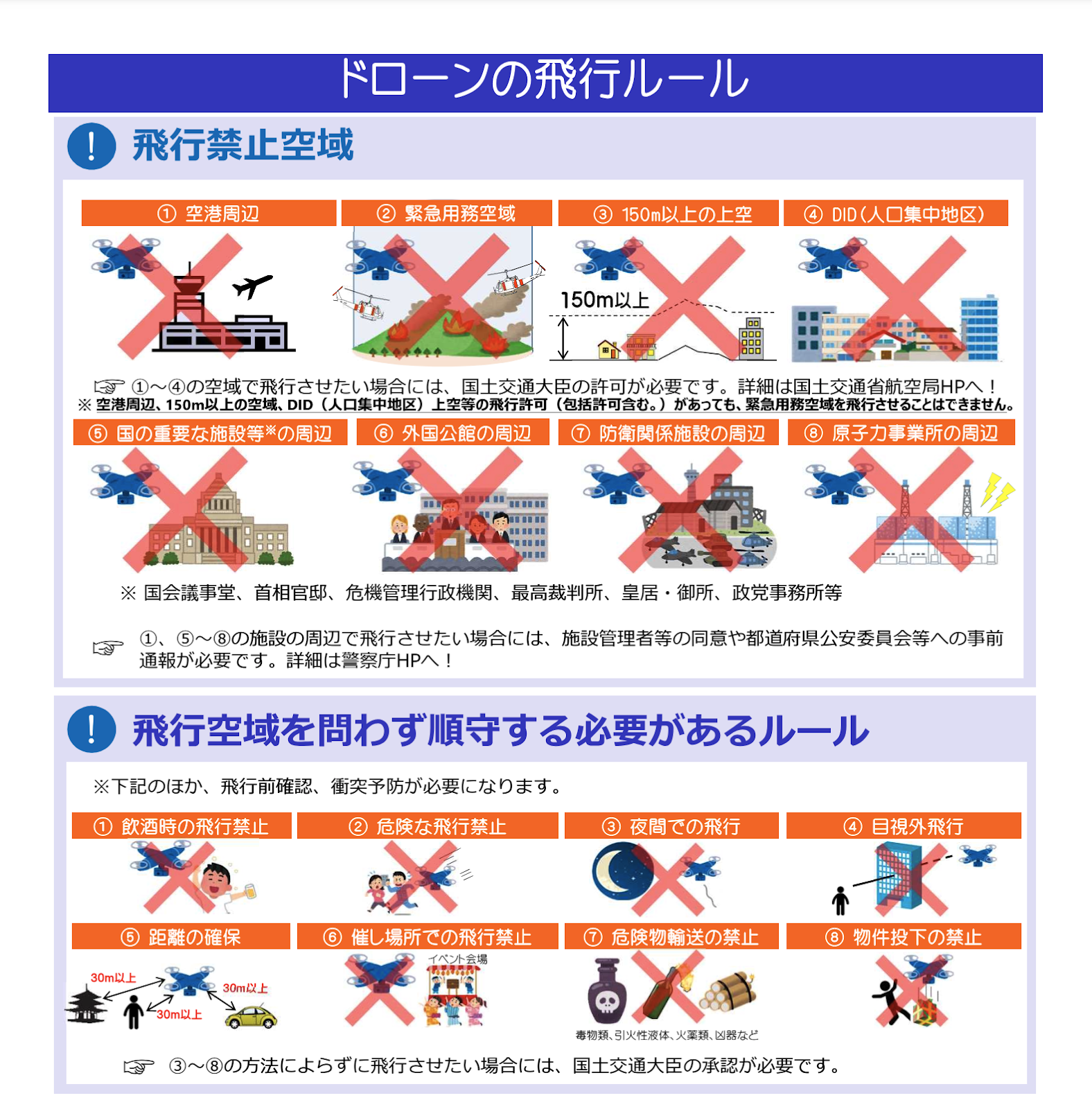
屋外で目視外飛行する場合は国土交通省に申請が必要
前編で紹介した室内での飛行については、航空法の適用外のため特段手続き不要でしたが、日本国内において、FPVゴーグルを使用して屋外で飛行させる場合は、航空法に定められた「目視外飛行」とみなされますので、原則として、事前に国土交通省から飛行の許可・承認を取得する必要があります。
マニュアルモードとは?
「FPVドローン」とは「ゴーグルを装着してカメラ映像を見ながら飛行するドローン」、なおかつ「通常の空撮用ドローンではできないアクロバットな姿勢制御での飛行ができるドローン」です。これから解説していくのは後者の内容になります。
通常のドローンは、機体を安定させるため、飛行中の機体の角度が一定角度までしか傾かないように制御されていますが、FPVでは機体角度が無制限に傾く飛行モードが搭載されています。自作機であればアクロモード、Avata 2では、M(マニュアル)モードと呼びます。Mモードでは機首を真下に向けて急降下させたり、ロール方向に回転させたりといったアクロバットな飛行が可能になります。
ちなみに前編で紹介した室内撮影では姿勢制御の機能をONにした状態で飛行させています。理由としては、Mモードに設定して機体角度を無制限にすると、機体の動作半径も広くなってきます。室内では壁や天井などに接触する可能性が高くなるため、基本的に姿勢制御を入れたまま飛行させることが多いです。
シミュレーターでの練習のススメ
上下左右を縦横無尽に動いて、高速で飛行するMモードでの操縦は、非常に難しいものです。最初のうちは普通に墜落すると思います。最高速度もノーマルモードでは8m/sですが、Mモードでは27m/sになるので、一瞬でも目を離したらあっという間にあらぬ方向に飛んでいってしまうなんてことも起こりえます。
そのため、いきなり実機で実践するのではなく、まずは感覚を掴むためにシミュレーターで練習することをお勧めします。DJI公式ページには、対応シミュレーターについて、「Liftoff、Uncrashed、DCL、The Drone Racing Leagueなどを含む、様々なシミュレーターに対応しています。」と記載されています。2024年5月現在、DJI純正のシミュレーターで、Mモードに対応したシミュレーターはないため、練習にはサードパーティーのシミュレーターを利用するしかありません。
上記の対応シミュレーターで練習する際には、DJI FPV送信機3を有線でPCと接続し、シミュレーター上でのコントローラーとして利用できます。今回使用したシミュレーターは「Uncrashed」。PCゲーム配信プラットフォームのSteamでダウンロードできます。


Avata 2をMモードに設定する方法
Avata 2では飛行の難しさから、初期設定のままでは、Mモードに切り替わらないように設計されています。Mモードを利用するためには、DJI FPV送信機3(モーションコントローラは非対応)で、以下の3つの手順を踏まないとMモードに設定できないようになっています。
1.送信機のバネを緩める。

空撮ドローンでは各種センサーでホバリングを安定してくれるため、機体を上下する操作スティックは自動でセンタリングする設計になっています。Mモードでは、こうしたセンサーの補助ではなく適切に舵を入れることで、ユーザー自身が高度を手動で維持することになります。
送信機の裏蓋を外して、六角レンチでネジを調整して自動的に操作スティックが自動的にセンタリングしないように調整する必要があります(モード2なら左スティック、モード1なら右スティック※)。ネジ穴が2つ(F1とF2)あり、両方調整する必要があります。1つはスティックがセンターに戻らないようにするネジ。もう1つはスティックの硬さを調整するネジです。中心に戻らないようにしつつ、自分が操作しやすい硬さに調整します。
※モード1とモード2とは送信機の操作モードはこちらを参照
2、送信機のスイッチをマニュアルモードに入れられるように割り当てる
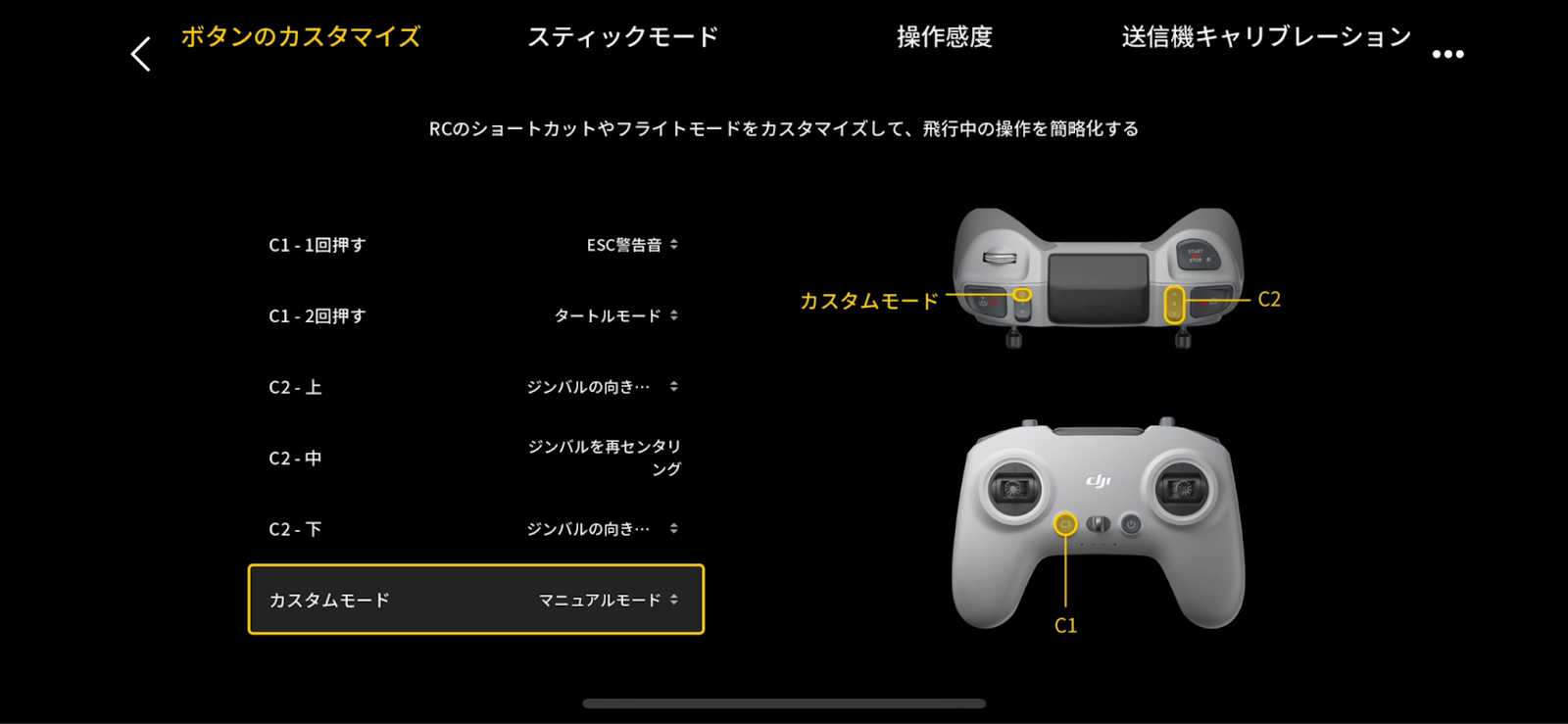
専用アプリDJI Flyでの設定。ゴーグルの設定から制御>送信機>ボタンのカスタマイズ>カスタムモード>マニュアルモード
3、Mモード姿勢制限を外す
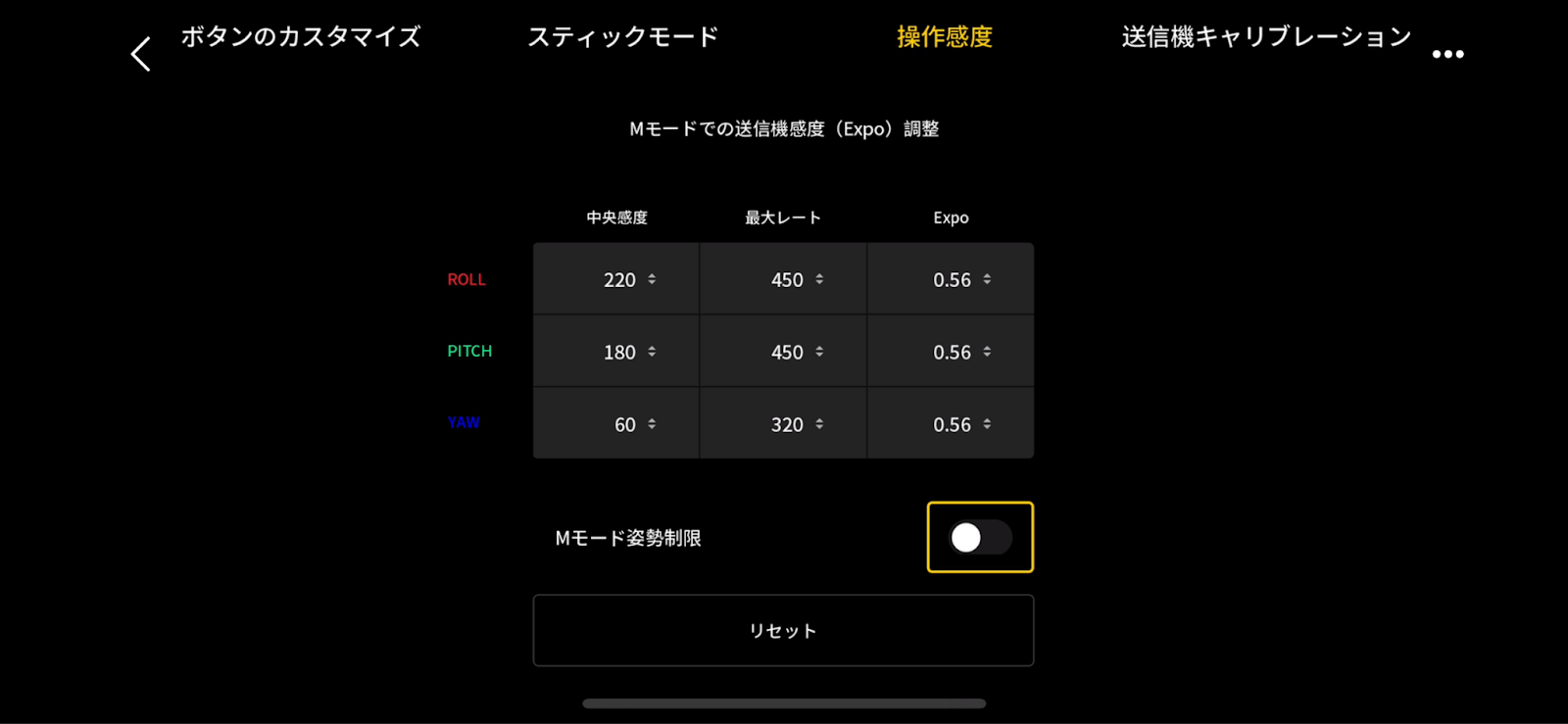
ゴーグルの設定から制御>送信機>操作感度>Mモード姿勢制限(グレーアウト)
これらの3つの手順を経て、マニュアルモードでの飛行が可能になります。ちなみに上の写真にはなにやら難しげな数字が並んでいますが、この数値を調整して機体の速度やスティック操作に対しての機体がどれだけ動くのかといった挙動を変更することができます。もちろん初期設定で飛ばすことも問題ありませんが、自分が頭のなかでイメージしているワークに近づけるために、機体の動きや挙動を調整していきます。
言葉では伝えるのが難しいのですが、ざっくり言うと「中央感度」=スティックを倒したとき、初動でどれくらい加速するか。「最大レート」=最大スピード。「exp」→舵の効き具合を滑らかにするか、敏感にするか…という感じです(伝わりやすい、いい表現がないかずっと探してます)。
緊急停止ボタンとタートルモード
Mモードでの撮影は常に墜落のリスクと隣合わせです。Avata 2にはリスクヘッジの意味でも緊急停止ボタンが搭載されています。また、自分の手の届かない場所に機体が墜落してしまった場合などに、ひっくり返ってしまった機体を起き上がらせるタートルモードという機能も搭載されています。
緊急停止ボタン
飛行中に何か危険を感じた場合緊急停止ボタンをおすとピタッとホバリングします。Mモードの練習をする場合など常に押せるようにしておくと安心かもしれません。

タートルモード
カメラを軸にパタンと回転します。ボタンの割り当て>C1ボタンに割り当てが可能で、私はC1ボタンを1度押しでビープ音。2度押しでタートルモードに割り当てています。
飛行モードとブレ補正の設定を変えて撮影したサンプル
従来からのFPVドローンユーザーのみなさんは、カメラのブレ補正はOFFに設定して、CMOSセンサーを一番広く使えるようにするため、一般的な映像のアスペクト比(16:9)ではなく、2:3や4:3などのアスペクト比で撮影しておき(ARRIやBMCCなどに搭載されているOpen Gateと呼ばれるもの)、後からPCのソフトを使ってブレ補正をかけるというフローで映像を作る人もいると思います。
Avata 2では4K (4:3)、 3840×2880/60pの録画モードが搭載されています。筆者としてはこれにとてもメリットを感じています。というのも、この4:3で撮影したデータを、16:9で利用する場合には、撮影時に地面をどの程度入れるか悩むこともあるのですが、上下に余ったデータがあるので、何かと忙しない撮影時には悩まず、後から編集で調整できます。
また、SNSの縦位置動画としてFHD解像度にして利用する場合にも、16:9で撮影しているときよりも上下の余白が広くなります。後から電子的にブレ補正をかけると画角がクロップされて狭まりますが、その場合にも画角を最大限に残しつつブレ補正をかけることができるので、「思ったよりも狭くなってしまった」ということが起こりづらい安心感があります。
DJI Avata 2に搭載されたカメラのブレ補正とGyroflowでの補正の比較
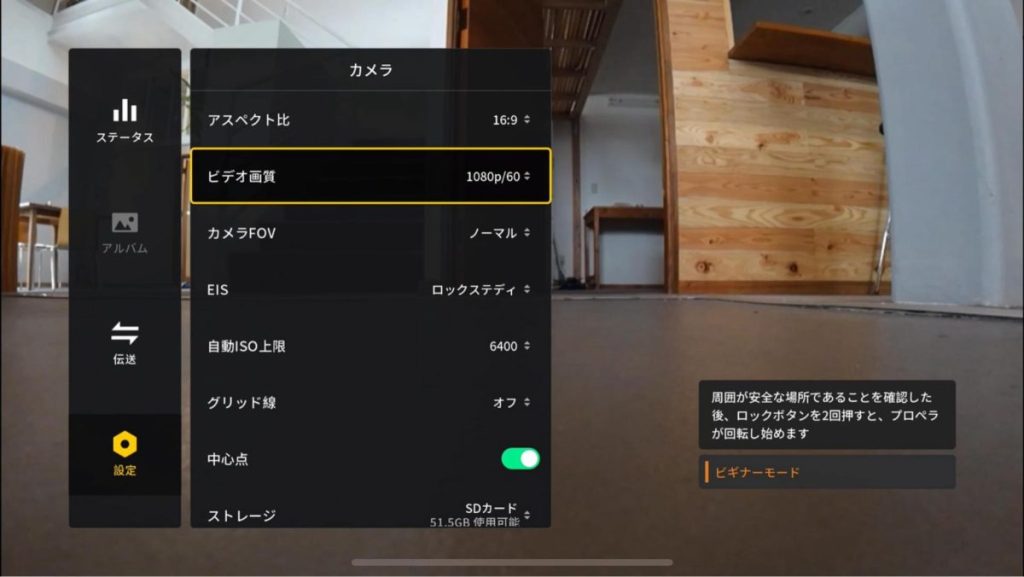
Avata 2では、専用アプリのDJI Flyから「ブレ補正なし」「RockSteady 3.0+(通常のブレ補正)」「HorizonSteady(水平を保つことを重視したブレ補正)」の3種類から選ぶことが可能です。多くの方はRockSteady 3.0+を設定して使うことが多いと思います。
ただし、ブレ自体はRockSteady 3.0+でも十分抑えられるのですが、気になるのは実はブレではなく、広角ならではの歪曲です。演出意図にもよりますが、歪曲補正をどうせかけるなら、ブレと歪曲補正を同時にかけられる「Gyroflow」が便利という場面もありそうです。
Gyroflowは無料で使えるブレ補正のソフトウェアです。通常の電子式なブレ補正とは異なり、撮影時のジャイロ(傾きのセンサー)データを利用したブレ補正が可能となります。Gyroflowでブレ補正をするには、ブレ補正をOFFにして、広角で撮影しておく必要があります。この設定にしておけば、動画データの中にジャイロセンサーの情報が含まれるため、Gyroflowでのブレ補正に対応することができます。
以下、RockSteady 3.0+、ブレ補正なし、Gyroflowの画角と歪曲の違いが見て取れると思います。



余談ですが、このGyroflow。DJI Avata 2以外にも、ソニーのαシリーズ(新しめの機種)やDJI Action2、GoProなどのブレ補正にも対応しています。
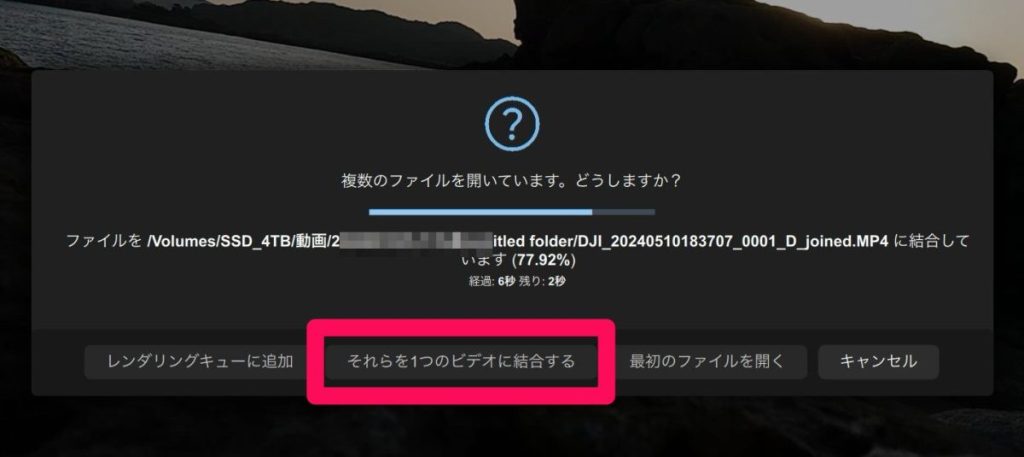
ひとつAvata 2の映像をGyroflowでブレ補正をかける際の注意点とその対処法を紹介しておきます。Avata 2の仕様として録画データが3.78GBで分割されてしまいます。Gyroflowで分割されたデータそれぞれにブレ補正をかけるとカットの繋ぎ目で画角が合わないということが起こります。 その際はGyroflowにふたつのデータを同時にドラッグすると、下のような結合の設定画面が表示されます。「それらを1つのビデオに結合する」を選ぶと解決することができます。この際、保存先を元々の録画データとは別のフォルダをに指定しないとエラーになります。
DJI Avata 2は空撮機の代替になるのか?
ここまではFPVドローンならではのMモードを中心に解説してきましたが、おそらくAvata 2もカメラがついて外を飛ぶということで、普通の空撮機のように使えるのか、気になる人もいるのではないでしょうか? 結論から言うと、正面まっすぐ飛ぶような画に関しては、空撮機と同じように撮影することができます。ただし、完全に空撮機に置き換わる存在になるかというとそれは難しいでしょう。空撮機には空撮機としてのメリットがあります。

ジンバルに注目してみましょう。Avata 2は1軸ジンバルを採用していますが、これは主にチルト操作をするためのものです。DJI空撮機は3軸ジンバルによる補正機能を有しており、その点でAvata 2は電子的な手ブレ補正に頼っているため、ホバリングの際も結構揺れますし、風がある場合は機体自体も斜めになるため、つられてカメラも斜めになります。それに対して、空撮機は、3軸ジンバルで機体が斜めでもカメラは常に水平をキープするため、安定した画を撮影することができます。
次のポイントは「視界の制限」。Avata 2はゴーグルを使用する飛行スタイルなので、基本的に前方(カメラ映像)しか見えないため、操作は主に前進が中心となります。左右や後方への移動も可能ではありますが、ゴーグルでは見えない方向へ移動することになり、障害物などに衝突してしまう可能性が高いので、基本的には行いません。これはモニターと機体を目視で交互に確認しながら操作できる通常の空撮機に比べて不利な点と言えるでしょう。
まとめ
最後に、自作機とAvata 2を比較してみて、感じたそれぞれのいいところを紹介します。
Avata 2のいいところ
- バッテリーが持つので、被写体のスタートを待つことができる
- ジンバルの角度を変更が可能なので、Mモードでの機体の速度や通常撮れない狭い場所からの俯瞰や上向き撮影など、自由度が高い。
自作機のいいところ
- 全部マニュアルなので、慣れてしまえば自由自在に動く。Avata 2はセンサー裏側で動いている感があり、ちょっともっさり感があるので、被写体に超近接するのが自作機の方が安心感がある(慣れの問題もあるが)。
- 室内などGPSが入らない場所でもセンサーに依存しないため飛行ができる(Avata 2では暗い場合は、ビジョンポジショニングセンサーが認識できなくなるため、フラついてしまうのでGPSが入らない環境の場合は明るさに注意が必要)。
空撮機、Avata 2、自作機とそれぞれ得意なことが異なるので、状況に応じて使い分けが必要です。
「マイクロドローンのように室内を撮りたい」「レース機のようにアクロバティックな速度感がある映像を撮りたい」そんなふたつのニーズをひとつの機体で、自作することなく空撮できるようになったAvata 2。間違いなくゲームチェンジャーとも言えるドローンです。色々と書き連ねてきましたが、とにかくゴーグルで自分が飛んだ気分を味わえるという、脳が開花するような体験はとにかく楽しいので、ぜひ体験してみてほしいと思います。